Muscle-bound MachinesGentle is not a word you usually associate with mechanical engineering. A Harvard University team’s vacuum powered actuator provides a softer and more flexible alternative to traditional hydraulic piston and motor powered actuators. Robots are used when safety, speed, accuracy and repeatability are critical. Replacing rigid actuators may help keep robots steady in unpredictable environments such as search and rescue in dangerous, icy or inaccessible areas, bomb defusal situations or sea and space exploration. The next generation of robots for use inside the home will be more gentle and friendlier than their industrial ancestors. Think about the difference between Pixar’s Wall E, an autonomous rubbish clean up robot, and Disney’s Baymax in Big Hero 6, a friendly healthcare robot. Soft actuators will be crucial to limit injuries to humans where humans and robots are working together, or in the future robotic service industry. Harvard’s VAMPHarvard’s actuator is a type of VAMP, or vacuum-actuated muscle-inspired pneumatic structure. It is made from a soft, self-healing rubber material with a honeycomb-like structure inside. When the air inside the structure is removed with a vacuum, the rubber material buckles and contracts. The contraction is released when the vacuum is reduced. The combination of contracting and releasing movement provides similar mechanics to a muscle. Different types of movement - linear, bending, twisting - or a combination of movements can be achieved by changing the design of the honeycomb structure. ApplicationsBecause the actuator is capable of complex movements, it could be used where traditional actuator systems take up too much space or are simply not possible. Compact, muscle like actuators would be especially useful where people are interacting with machines at work or in daily life.
Gentle actuators would also be useful when handling fragile goods.
If you’re looking for a human centred product design, give our Melbourne team a call on
Don't miss out. Sign up for our newsletter now!
|
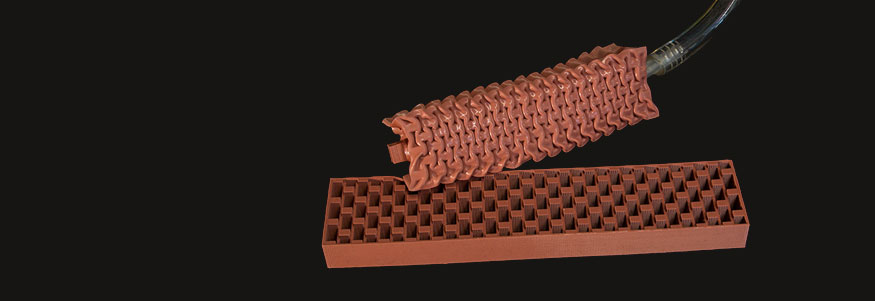
When the air inside the structure is removed with a vacuum, the rubber material buckles and contracts
Exoskeletons like this example by Lockheed Martin need compact actuators |
+61 3 9413 9000